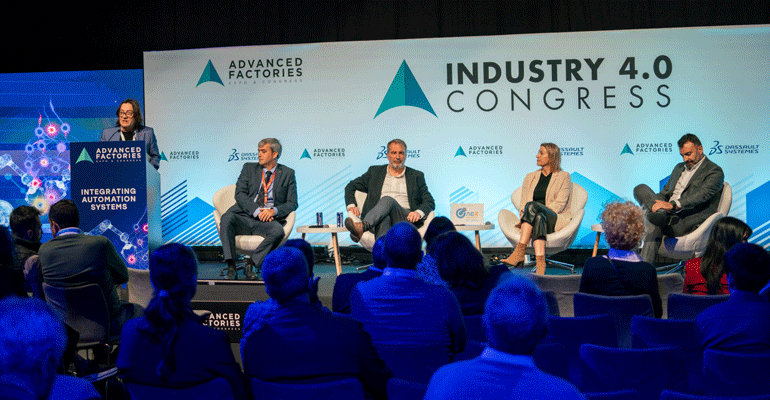









Advanced Factories sitúa la Industria 4.IA en el centro del futuro industrial europeo
Representantes del Ministerio para la Transformación Digital y líderes industriales coinciden en definir un marco para una IA confiable y alineada con los valores europeos.
Leer más »